
Genesis是一款革命性的开源物理引擎,专为机器人研究与物理应用打造。它融合了超快的模拟速度与生成式功能,能够创建动态的4D环境,为研究人员和开发者提供强大的支持。Genesis不仅在速度和准确性上树立了新标杆,还以用户友好的设计降低了技术门槛,为全球科研人员开辟了更多可能性。 https://genesis-embodied-ai.github.io/
核心特点与优势
1. 简化资产创建与场景设计
Genesis通过自动化数据生成与收集,大幅减少了手动工作量。无论是资产创建、任务设计还是场景建模,Genesis都能加速项目进程,降低成本,使小型团队也能在机器人研究领域与大型团队竞争。
2. 可微分仿真
与AI和机器学习框架的兼容性是Genesis的一大亮点。它支持可微分求解器(Differentiable Solvers),非常适合高级机器人控制应用。这一功能让研究人员能够以更高的效率优化控制算法。
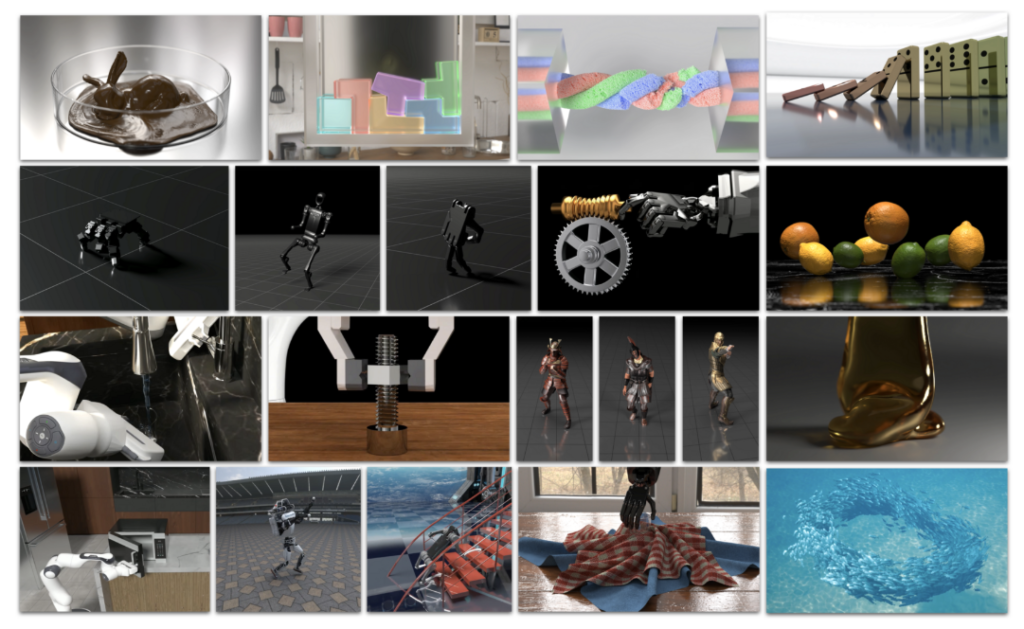
3. 逼真的光线追踪渲染
Genesis内置先进的光线追踪功能,生成高质量的视觉输出,非常适合用于演示、研究和协作。这种照片级真实感的渲染效果能显著提升模型的展示效果。
4. 强调易用性与社区驱动
Genesis通过简化的安装流程和直观的API设计,降低了入门门槛,使初学者可以快速上手,同时为专业人士提供足够的深度与灵活性。研究人员可以将精力集中在创新上,而非重复性任务。作为一款完全开源的平台,Genesis邀请全球研究者和开发者通过GitHub反馈问题、提出建议并协作开发,为平台注入更多活力。
技术亮点
- 超高速模拟:
- 提供430,000倍实时速度的物理仿真,在单张RTX 4090显卡上实现每秒43亿帧的模拟速度。
- 基于纯Python开发,比现有的GPU解决方案(如Isaac Gym)快10-80倍。
- 多平台兼容性:
- 支持Linux、macOS和Windows操作系统,以及CPU、NVIDIA、AMD和Apple Metal后端。
- 多物理求解器支持:
- 包括刚体(Rigid Body)、粒子(MPM)、流体(SPH和Stable Fluid)、有限元(FEM)和基于位置的动态(PBD)等求解器,适配多种复杂模拟需求。
- 机器人平台兼容性:
- 支持机械臂、腿式机器人、无人机和软体机器人等多种平台,并兼容MJCF、URDF、obj和glb文件格式。
- 快速训练能力:
- 能够在26秒内训练出适用于现实场景的机器人行走策略,为机器人学习领域提供了突破性效率。
- 易于安装:
- 通过PyPI一键安装:bashCopy code
pip install genesis-world # Requires Python >=3.9
- 通过PyPI一键安装:bashCopy code
- 即将推出生成式框架:
- 新增的“.generate”方法和生成式框架将进一步提升Genesis的建模与模拟能力。
为机器人研究赋能
Genesis的使命是通过易用性和高效性实现机器人研究的普及化。它的创新功能为研究者和开发者提供了强大工具,无需高昂资源或深厚技术背景即可解决复杂问题。同时,Genesis的开放性和速度为新一代物理与机器人模拟设定了新标准。
未来,Genesis的开发计划将进一步扩展其功能,包括更强大的可微分求解器和生成式模拟特性。这将让用户能够构建更复杂、更精确的模型和场景,助力科学研究和工业应用的发展。
无论是简化工作流程、缩短项目时间,还是加速机器人训练,Genesis都以其卓越性能和友好设计,成为推进机器人研究不可或缺的工具。