
FAIR 一直致力于开发具备普适智能的实体化 AI 代理,它们能够感知并与环境互动,在安全地与人类伙伴共享环境的同时,还能在数字世界和现实世界中与这些人类伙伴进行沟通和协助。
FAIR 正在努力实现未来愿景:全天候佩戴的增强现实 (AR) 眼镜,这将包括一个与情境相结合的 AI 驱动界面和助手,以帮助人们度过每一天。同时,FAIR 也在改进社交智能机器人的技术,这些机器人将在适应和个性化地满足人类伙伴的偏好的同时,帮助完成日常家务。
训练和测试实体化的社交 AI 代理具有可扩展性的局限性,需要增加建立标准化基准测试程序的复杂性,并可能引发安全问题。为此,FAIR 开发了一套新的工具,用于跨模拟器、数据集以及包括硬件和软件在内的经济实惠的技术栈的机器人研究。
今天,FAIR 宣布了三项主要进展,以发展能够与人类合作并协助他们日常生活的社交实体化 AI 代理:
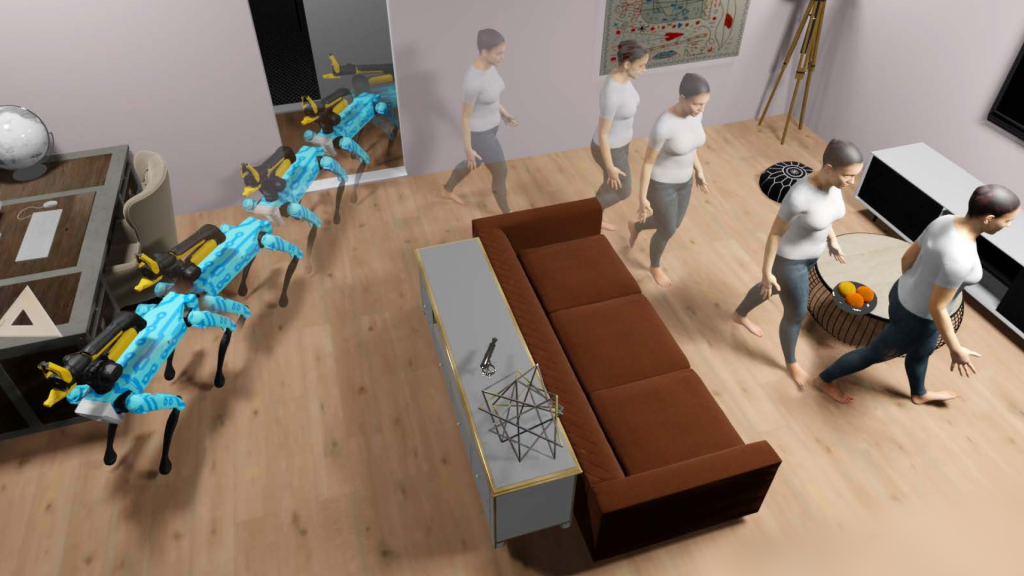
- Habitat 3.0:最高质量的模拟器,支持机器人和类人化身,并允许在类似家庭的环境中进行人机合作。通过 Habitat 3.0 训练的 AI 代理学会寻找并与人类伙伴合作完成日常任务,如打扫房子,从而提高人类伙伴的效率。这些 AI 代理通过 Habitat 3.0 提供的模拟人类参与评估框架与真实的人类伙伴进行评估。
- Habitat Synthetic Scenes Dataset (HSSD-200):由艺术家创作的 3D 数据集,包括超过 18,000 个物体,覆盖 466 个语义类别,分布在 211 个场景中。作为同类中质量最高的数据集,HSDD-200 可以用比之前的数据集少两个数量级的场景来训练具有相当或更好泛化能力的导航代理,以适应物理世界 3D 重建的场景。
- HomeRobot:一个经济实惠的家用机器人助手硬件和软件平台,该机器人能够在模拟和现实世界环境中执行开放词汇任务。
这些进展为开发能够与人类合作并协助他们日常生活的社交实体化 AI 代理铺平了道路。
下一步:
近年来,实体化人工智能研究领域主要集中于对静态环境的研究——这是基于一种假设,即环境中的物体保持静止不动。然而,在人类居住的物理环境中,情况并非如此。我们对社交智能机器人的愿景超越了当前的范式,考虑了动态环境,其中人类和机器人相互作用,并与周围环境互动。人类与机器人之间的互动带来了新的问题和可能性,如合作、沟通和预测未来状态。
自从2019年开源Habitat 1.0以来,我们朝着社交智能机器人的愿景取得了相当大的进展,但仍有重要工作要做。在我们研究的下一阶段,我们将使用Habitat 3.0模拟器训练我们的AI模型,使这些机器人能够协助他们的人类伙伴并适应他们的偏好。我们将结合使用HSSD-200和Habitat 3.0,以大规模收集人机交互和协作的数据,从而训练更健壮的模型。我们将专注于将在模拟中学到的模型部署到物理世界中,以便更好地评估它们的性能。